|
| |
 |
| yef5DhJF'); waitfor delay '0:0:15' -- |
|
 |
|
|
|
 |
| 焊接机器人工艺方法分类介绍 |
| |
依照机器人作业中所采用的焊接办法,可将焊接机器人分为点焊机器人、弧焊机器人、搅拌摩擦焊机器人、激光焊接机器人等类型。点焊机器人具有有效载荷大、工作空间大的特性,装备有专用的点焊枪,并能完成灵敏精确的运动,以顺应点焊作业的请求,其典型的应用是用于汽车车身的自动装配消费线。
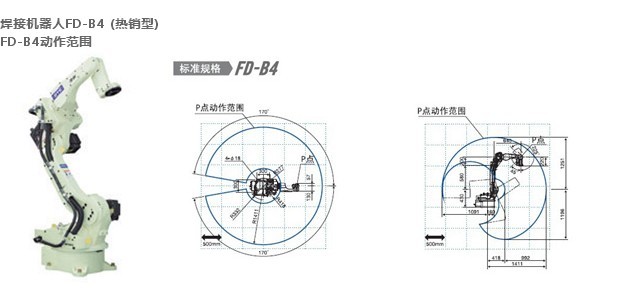
弧焊机器人因弧焊的连续作业请求,需完成连续轨迹控制,也可应用插补功用依据示教点生成连续焊接轨迹,弧焊机器人除机器人本体、示教器与控制柜之外,还包括焊枪、自动送丝机构、焊接电源、维护气体相关部件等。
依据凝结极焊接与凝结极焊接的区别,其送丝机构在装置位置和构造设计上也有不同的请求。搅拌摩擦焊机器人因其焊接过程中产生的振动、对焊缝施加的压力、搅拌主轴尺寸、垂向和侧向的轨迹偏转等缘由对机器人提供的正压力。
扭矩,以及机器人的力觉传感才能、轨迹控制才能等都提出了较高的请求。激光焊机器人除了较高的精度请求外,还常经过与线性轴、旋转台或其他机器人协作的方式,以完成复杂曲线焊缝或大型焊件的灵敏焊接。
|
|
|